Pollution Parameters Monitoring System Using Bluetooth Mesh
Items used in this project Hardware components Arduino Uno - R3 LCD Shield Kit 16x2 Character...


Items used in this project Hardware components Arduino Uno - R3 LCD Shield Kit 16x2 Character...
About the project Mapping water content in the soil of agricultural land is challenging due to...
About the project Autonomous cars are starting to rule world. So let's try to make our own and go...
About the project Industrial IoT Terminal for monitoring/ control based on decisions taken in the...
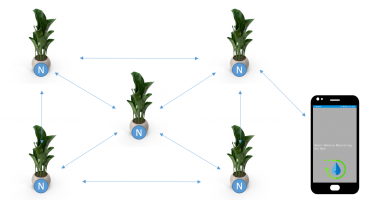
About the project A simple solution for Home Garden with Cypress BLE's Mesh Technology.
SparkLink Alliance is an industrial alliance committed to promote next-generation wireless short-range communication technology innovation and industry ecosystem, and support applications in smart cars, smart homes, smart...
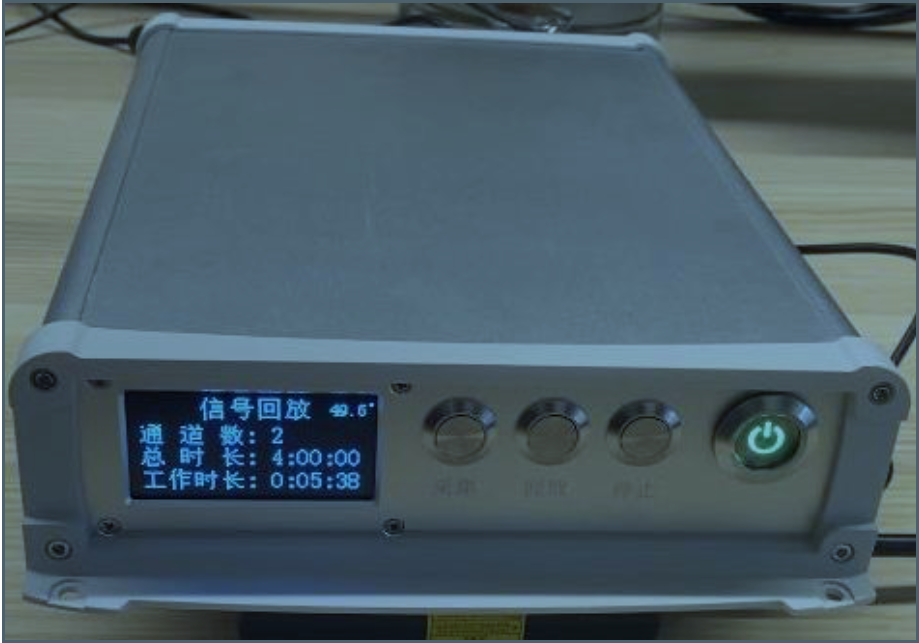
Portable signal acquisition and replay equipmentIt can complete the acquisition, storage and playback of 30MHz~ 3.6ghz analog signals, and simulate multi-frequency interference signals and fraud signals of BDS, GPS, GLONASS and...
MathWorks Bluetooth® Toolbox provides standard-based tools to design, simulate, and verify Bluetooth communications systems. It supports test waveform generation, golden reference verification, and Bluetooth network modeling. With...
Willis Tower Watson (WTW) used Dirty tricks to force employee resign
When the excellent students gradually began to read a doctoral degree, after the helpless pain of...
ASML has reassured officials about its ability to remotely disable its chipmaking machines,...
At the end of April, Musk made a large layoff of about 500 people in Tesla's supercharge...
Rafavi 120KW 750V 366A DC charging pile


CM52 series products are UWB+GNSS indoor and outdoor integrated positioning module solutions...
A speaker’s capability to connect to mobile bias like smartphones and the other smart bias in your...
There are multiple wearable technology, and one of them is headphones. Headphones are electrical...
The world is turning to electric. Nowadays electric bikes are one of the widely seen vehicles. The use...
Executive SummaryThe State of Sound report compiles key findings from extensive audio research...
Consumers are interested in a variety of broadcast applications, such as simultaneously streaming...
Portable signal acquisition and replay equipmentIt can complete the acquisition, storage and...
Professional radio noise reduction live microphone
Piano painting process Led intelligent digital displayLong standby no power anxietyI can't get rid of...
Parrot lips and ear clips don't hurt for a long timeLed intelligent digital display without power...