")

本项目将利用多个BLE4.0蓝牙模块,配合主控板、OLED显示屏等,构建一个无线定位系统。
1. 简介
本项目将利用多个BLE4.0蓝牙模块,配合主控板、OLED显示屏等,构建一个无线定位系统。
本项目的系统构成为:3个信号塔,1个中控台,2个被定位的目标。
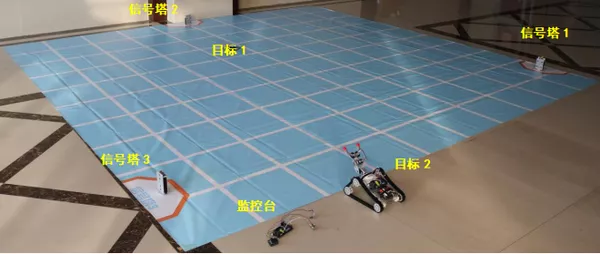
无线定位的用途有很多。比如,我们可以把固定的目标1看作等待救援的人或物,把可移动的目标2看作前来救援的机器人,就可以虚拟出一个救援场景模型。
而现实中使用蓝牙技术进行无线定位,多见于商场、图书馆等室内环境的定位和导航。比如,在商场内安装数个蓝牙信号发射源;在商家门口安装蓝牙定位设备;对于顾客,则可以直接使用其智能手机的蓝牙模块,再配合一个商场专用的手机App或者小程序,就可以让顾客非常方便的在商场内部寻找自己想要到达的商家等。
2. 定位原理
(1)rssi无线接收信号强度
Received Signal Strength Indication接收的信号强度指示,通过接收到的信号强弱测定信号点与接收点的距离,进而根据相应数据进行定位计算的一种定位技术。
RSSI是射频信号理论术语,主要应用于发射机和接收机之间的距离测量。该方法是依据接收信号能量强度确定距离,对通信信道参数要求较高。其测距理论是:依据无线电波或声波在介质中传输,信号功率是随传播距离衰减的原理。根据信标节点已知信号的发射功率和节点接收的信号功率,通过信号与距离之间的衰减模型,就可以计算出节点间的距离。由于信号传播的过程中,受到距离和障碍物的影响。信号的功率强度随之衰减,间接影响精度。所以要求得到良好的精度,短距离才会体现这一点。
RSSI的定位技术相比于TOA、TDOA、AOA、GPS具有成本低、容易实现等优势。如果室内定位精度要求不高,基于RSSI的定位技术完全可以满足。而且,现阶段对于作为节点的传感器,都能够完成发射测试信号功率的任务。主要进行实验时,节点发送数据包,也获取RSSI的测量值。该定位技术既无需额外硬件,又能完成复杂信息的分析处理,减小通信消费,节约成本,比较适用于无线传感器网络的定位系统。
| 测距方式 | 精度 |
备注 |
| TOA | 3.10m | 器材昂贵,存在干扰 |
| TODA | 平均20cm | 有效距离大于200m |
| AOA | 几毫米 | 利用激光测距,有效范围是5-300m,代价高 |
| RSSI | 1-5m | 成本低,容易实现 |
| TDOA和AOA |
20-80cm |
最大可测距离50m |
| GPS |
5-15m |
昂贵,不可在室内 |
几种测距方式对比 :
(2)rssi三点定位算法的基本原理
三点定位算法在需要进行定位的空间放置3个AP(无线访问接入点),并且3个AP的位置已知,如果知道该空间内某位置的信号强度则可建立信号衰减模型,根据该信号强度计算出该位置到三个AP的距离。使用某位置移动设备的信号强度即可估算出其到附近AP的距离,如果能确定若干AP的位置,即可确定该移动设备的位置。由于障碍物的存在,信号衰减模型在实际使用时会存在一定误差。
已知三个点的坐标和未知点到这三个点的rssi的信号值,求解未知点的坐标。
首先是将rssi信号转换为距离:
d=10^((ABS(RSSI)-A)/(10*n))
其中d为距离,单位是m。
RSSI为rssi信号强度,为负数。
A为距离探测设备1m时的rssi值的绝对值,最佳范围在45-49之间。
n为环境衰减因子,需要测试矫正,最佳范围在3.25-4.5之间。
在获取未知点到三个点的距离后,剩下的就是求解未知点的坐标。我们都知道两个圆会相交于一个或者两个点(如果相交),那么三个圆如果相交的话,必然会交于一个点(三个探测设备在一条直线上的情况下有可能相交于两个点,这里不考虑),所以我们要求解的未知点便是以三个已知点为圆心,以他们与未知点之间的距离为半径画出的三个圆的交点。那么这个问题就转化为了求三个已知圆的交点,然后如果根据圆的方程:
(x1 – x)^2 + (y1-y)^2 = r1^2
(x2 – x)^2 + (y2-y)^2= r2^2
(x3 – x)^2 + (y3-y)^2= r3^2
求解的话,是非常难求出未知点的坐标的。
这里介绍另一种程序容易实现的计算方法:
①、判断任意两个圆是否相切(内切或外切),这里可以设定一个误差允许值d,也就是 (x1 – x2)^2 + (y1-y2)^2= (r1+r2+d)^2
满足上述公式时就认为两个圆相切,其中d为误差值,可以是正数或者负数。如果两个圆相切的话,那么交点就比较好求解了:
x = x1+ (x2 - x1)*(r1/(r1 + r2));
y = y1 + (y2- y1)*(r1/(r1 + r2));
求解到x和y的坐标后,只需要用第三个圆进行验证,即求出这个点到第三个圆的圆心的距离,再和第三个圆的半径做比较,如果在误差允许范围内,那么就可以认为求得的x,y是三个圆的交点,也就是未知点的坐标。
②、没有任意两个圆相切,那么就先用两个圆求解两个交点,如下图:
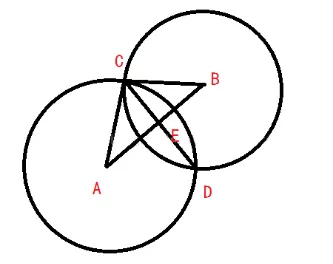
其中A,B是两个圆心,坐标分别为(xa,ya)和(xb,yb),C,D是两个圆的交点,E为AB与CD的交点。
其中
AB^2 = (xa – xb)^2 +(ya-yb)^2
其中
AC^2 =AE^2 + CE^2 ……………………1
BC^2 = BE^2+ CE^2 ……………………2
AC = ra
BC= rb
AE + BE = AB = (xa – xb)^2+ (ya – yb)^2
等式2转换为
BC^2 = (AB - AE)^2 + CE^2
BC^2 = AB^2 + AE^2 – 2*AB*AE + CE^2 ……………………3
等式3减去等式1:
BC^2 - AC^2 = AB^2 – 2*AB*AE
AE = (rb ^2 - ra ^2 -AB^2)/( – 2*AB)
于是可以根据以下公式求得CE
CE^2 = AC^2 – AE^2
我们还可以获取E点的坐标(xE, yE)
xE = xa + ( (xb- xa)*AE )/AB
yE = ya + ( (yb- ya)*AE )/AB
然后我需要求得AB和CD的斜率KAB和KCD
kAB = (yb - ya)/(xb - xa)
kCD = (-1)/kAB //这里要注意kAB为0的情况
然后求得CD和x轴的夹角
∠CDX = atan(kCD)
这时候就可以求得C (xc, yc)和D(xd, yd)的坐标
xc = xE + CE*cos(∠CDXs)
yc = yE + CE*sin (∠CDXs)
xd = xE - CE*cos(∠CDXs)
yd = yE - CE*sin (∠CDXs) //这里也要注意sin (∠CDXs)和cos(∠CDXs)为nan的情况。
至此,我们就求得了两个圆的两个交点坐标,然后只需要用这两个点去第三个圆做验证,就可以获得三个圆的交点,也就是我们要求的未知点。
当我们基于rssi的三点定位算法实现蓝牙无线定位时,可按如下图所示位置放置蓝牙信号发射塔。
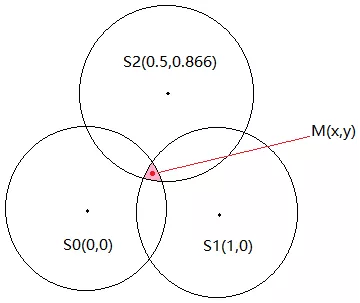
在理想情况下,以三个定节点为圆心,各自与盲节点的距离为半径的圆会交于一点,但是实际测量中,因为有误差因素,导致三组方程出现6个解(即三圆两两相交,产生6个交点,如上图。选取靠内的三个交点(即图中的红色区域),取它们的坐标的平均值作为最终定位的盲节点坐标,即可完成定位。